

0 引言
云的观测是气象业务中的核心内容,涵盖云高、云状和云量等关键要素。云观测方式经历了从人工到自动的演变。人工观测因其主观性强、误差较大、难以实现连续观测等问题,正逐步被自动观测取代。当前自动观测主要包括天基(如卫星)、空基(如飞机、飞艇、探空气球)和地基(如激光云高仪、云雷达、成像仪)3种方式(夏德深等,1999;路志英等,2000;周著华等,2005;张艳品等,2014)。天基观测能够实现对全球云况的监测,但空间分辨率较低(李晨蕊等,2022),且被动观测方式难以获取云顶以下的结构信息(Tan et al.,2024);空基观测能获取高质量垂直剖面信息,但观测范围有限、成本高,难以实现业务化运行;相比之下,地基观测部署灵活、成本较低,适用于长期业务化运行,成为当前主流的云观测手段。近年来,激光云高仪、全天空成像仪和毫米波云雷达的快速发展明显提升了地基观测的技术水平。其中,全天空成像仪在量监测方面趋于成熟,而毫米波云雷达因其可探测云顶、云底及云内部结构(Ming et al.,2021),并输出云内部反射率、垂直速度等多种云微物理量,是当前最有效的地基测云设备之一(李海飞等,2017;刘光普等,2019;姬雪帅等,2022;徐路扬等,2023;李慧等,2023;郭立平等,2024)。
目前,气象业务中广泛使用的“天气现象视频智能观测仪”主要依赖图像识别技术,通过卷积神经网络(Convolutional Neural Networks,CNN)等深度学习模型处理多路视频数据,实现天气现象与云分类的自动识别。然而,该系统作为纯视觉观测方式,存在以下缺陷:1)对多层云的识别能力较弱,尤其在低层云遮挡高层云时;2)夜间观测能力下降;3)云状识别准确性受限。针对上述问题,已有研究尝试融合云物理特征和图像纹理特征改进分类方法,如基于多通道红外图像和纹理特征的云类识别(孙学金等,2009),或基于毫米波云雷达特征参数的分级多阈值判别方法(杨晓等,2019)。此外,也有研究采用卷积神经网络、反向传播神经网络等AI方法对地基数据进行云状分类(余安安等,2021),但在观测数据融合与方法对比分析方面仍存在不足,尤其是在多源数据融合和垂直结构识别方面尚需改进。基于张掖国家气候观象台试验外场(简称“张掖外场”)2023年5月1日至2024年4月30日的观测数据,结合毫米波云雷达、全天空成像仪、人工观测记录和地面自动站资料,构建多源高质量AI训练样本库,并利用多种机器学习算法开展对9类云状及降水天气的自动识别研究,旨在提升地基云观测的智能化和精细化水平。
1 设备、资料与方法
1.1 观测设备
Ka波段毫米波云雷达型号为YLU4型,生产厂家为无锡智鸿达电子有限公司,具体性能指标见表1。观测的物理量包括反射率因子、径向速度、谱宽、云顶高度及云底高度等;主要产品包含质控后的基数据、液态含水量、衰减订正后的反射率、有效粒子半径等。
表1 Ka波段毫米波云雷达主要性能指标
Tab.1
| 技术体制 | 工作频率 | 天线口径/m | 探测高度范围 | 距离分辨率/m | 观测模式 | 脉冲宽度/us | 灵敏度/dBm |
|---|---|---|---|---|---|---|---|
| 全固态,全相参多普勒 | 35 GHz±200 MHz | 1.8 | 100 m~15 km | 30 | 垂直顶空、多普勒、脉冲压缩 | 0.2、5、12、24 | -119.0、-133.0、-136.8、-139.8 |
全天空成像仪型号为ASC200型(表2),安徽云能天智能科技有限责任公司生产。其主要产品包括可见光原图、可见光云图、红外原图、红外增强图、红外云图及云量等。
表2 全天空成像仪主要性能指标
Tab.2
| 红外波长/μm | 可见光视场角/(°) | 红外视场角/(°) | 采样周期/min | 可见光图像解析度/pixel | 红外图像解析度/pixel |
|---|---|---|---|---|---|
| 8~14 | 180 | 160 | 10 | 2 592×1 944 | 640×512 |
1.2 资料与方法
1.2.1 资料
2023年5月1日至2024年4月30日08:00、14:00、20:00张掖外场的人工观测数据、毫米波云雷达数据、全天空成像仪数据以及来自“天擎·甘肃”的地面自动站相关数据。
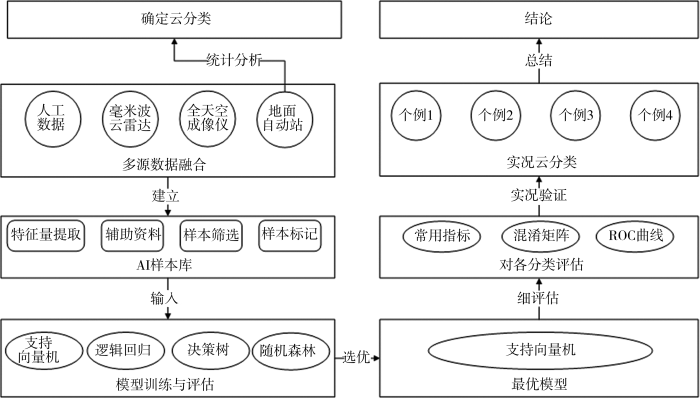
1.2.2 方法
图1
1.2.3 云状分类
依据《地面气象观测规范》(全国气象仪器与观测方法标准化技术委员会,2017)将云状划分为3族10属29类。鉴于研究初期技术条件限制,本研究以自动识别“10属”为目标。选取“天擎·甘肃”地面资料中张掖市6个地面站2023年5月1日至2024年4月30日的云状观测数据,共获得11 301次有效观测。结果显示,卷云、高积云、高层云和积云的出现频率分别为45%、33%、11%和8%;卷层云、卷积云、积雨云出现的次数分别为0次、40次和43次,属于低频类别。
卷层云数量为0,无法单独做为一类,同时卷层云与卷积云在物理特征上具有相似性,且卷积云数量有限,因此将卷积云和卷层云合并为一类,其余各属单独划分,最终形成9个分类,并据此对AI样本库进行标注(表3)。
表3 张掖市不同地区云状出现频次及云分类
Tab.3
| 云族 | 云属 | 云码 | 分类标签 | 出现频次/次 | 百分比/% | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 临泽 | 山丹 | 张掖 | 民乐 | 肃南 | 高台 | 合计 | |||||
| 高云 | 卷积云 | Cc | 1 | 19 | 3 | 2 | 1 | 11 | 4 | 40 | 0.4 |
| 卷层云 | Cs | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 卷云 | Ci | 2 | 960 | 741 | 664 | 887 | 1 005 | 810 | 5 067 | 44.8 | |
| 中云 | 高积云 | Ac | 3 | 833 | 517 | 413 | 453 | 969 | 498 | 3 683 | 32.6 |
| 高层云 | As | 4 | 184 | 250 | 171 | 287 | 124 | 222 | 1 238 | 11.0 | |
| 低云 | 雨层云 | Ns | 5 | 11 | 8 | 9 | 8 | 6 | 9 | 51 | 0.5 |
| 层云 | St | 6 | 13 | 11 | 10 | 7 | 13 | 19 | 73 | 0.6 | |
| 层积云 | Sc | 7 | 11 | 17 | 42 | 45 | 14 | 34 | 163 | 1.4 | |
| 积雨云 | Cb | 8 | 7 | 7 | 5 | 8 | 9 | 7 | 43 | 0.4 | |
| 积云 | Cu | 9 | 117 | 223 | 68 | 167 | 243 | 125 | 943 | 8.3 | |
1.2.4 AI样本库构建
AI样本库的构建包括特征量提取、辅助资料提取、云分类标注及样本筛选等关键步骤,详细流程见图2。
图2
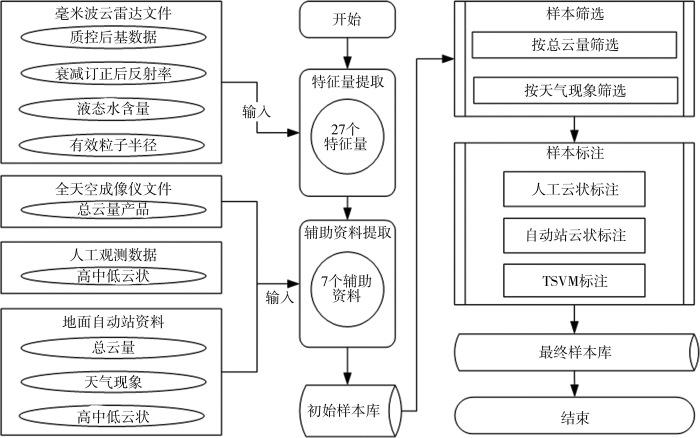
1)格式解析
毫米波云雷达的四类数据文件(质控后基数据、订正后反射率、液态水含量、有效粒子半径)存储结构一致,仅数据内容有所差异。以质控后基数据为例:文件由公共块和径向数据块构成,前者记录站点和任务等基础信息,后者包括多个子块,每个子块由径向头(观测要素及空间大小)、径向数据头(采样数量与存储规则)和径向数据(探测值)组成。观测要素包括反射率、径向速度和谱宽,每个要素含500个采样点,共计1 500个数据,径向分辨率为30 m、时间分辨率1 min、最大探测距离15 m(胡树贞等,2022;任丹阳等,2023;李慧等,2023;顾桃峰等,2023;张德玉等,2024a;张德玉等,2024b;张德玉等,2024c;王卫民等,2024)。
2)特征量提取
式中:Z为总反射率,
式中:
3)辅助资料提取和样本筛选
辅助资料包括全天空成像仪总云量、自动气象站逐小时观测资料(包括区站号、总云量、天气现象、高、中、低云状)及人工观测云状记录。
张掖外场毫米波云雷达为固定天线,仅观测天顶方向(90°仰角),而人工和自动站则面向全天空,观测覆盖范围存在差异。理论上,总云量越接近10成,云雷达数据越能代表全天空状况。以总云量作为阈值进行样本筛选时需在代表性和数量之间权衡,阈值过高会造成样本量太小,难以满足模型训练需求;阈值过低,则数据代表性不足,降低结果可靠性。经反复测试,最终选取总云量≥8成作为筛选阈值。此外,降水天气会显著影响毫米波云雷达的探测性能,为保证数据质量,结合自动站天气现象资料,剔除所有降水时段样本。依上述标准处理2023年5月1日至2024年4月30日的文件与数据,共获样本64 258条,经总云量与降水条件双重筛选后得到有效样本20 090条。
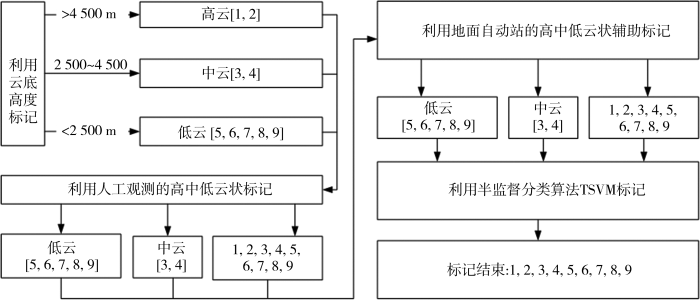
4)云分类标注
毫米波云雷达可穿透观测多层云,而人工与地面自动站观测仅限于视觉识别,导致云层数目存在差异,难以直接标注。对无法直接标注的样本,引入半监督分类方法,对未标注样本进行二次标注。比较转导支持向量机(Transductive Support Vector Machine,TSVM)、自训练分类器和标签传播算法三者的分类精度,结果表明转导支持向量机准确率最高,因此最终选择该算法。首先利用有标注样本训练初始支持向量机(Support Vector Machine,SVM)分类器,并对未标注样本进行预测,随后基于最大化间隔准则,迭代更新分类边界及样本标注,直至收敛或达到迭代次数上限。由于TSVM本质为二分类算法,多分类问题通过“一对一”方式转化为多个二分类任务实现。标注流程如图3所示,主要有以下4个步骤:1)依据《地面气象观测规范》(全国气象仪器与观测方法标准化技术委员会,2017)中各云属常见云底高度范围,结合观测数据将样本初步划分为高云、中云和低云;2)利用人工观测资料对各类样本进行标注;3)结合自动站观测数据进行辅助修正;4)采用TSVM对剩余未标注样本进行迭代标注。
图3
2 模型训练与评估
全部样本经洗牌与标准化处理,划分为训练集与测试集,各占样本总数的75%、25%。选择最佳特征量,依次输入支持向量机、逻辑回归、决策树、随机森林4种机器学习算法开展模型训练,各类学习模型借助网格搜索交叉验证(GridSearchCV)进行最佳参数匹配。训练结束后,通过模型评估和对比分析确定最佳模型。
2.1 特征量选择
2.2 模型参数选择
采用GridSearchCV优化参数的基本流程为:1)明确参数(学习率、正则化参数等超参数)及候选取值范围;2)遍历所有参数组合,并交叉验证评估模型性能。其中交叉验证是将数据集划分为k个子集,每次选取其中一个子集作为验证集,剩余部分作为训练集,最终将平均值作为评估结果;3)根据交叉验证结果选择最优参数配置。
2.3 模型评估指标
主要有准确率(
式中:Accuracy为分类正确的样本数占总样本数的比例,用于衡量模型整体的分类性能;TP为真正例,即实际为正类且被模型判定为正类的样本数量;TN为真负例,即实际为负类且被模型判定为负类的样本数量;FP为假正例,即实际为负类但被模型判定为正类的样本数量;FN为假负例,即实际为正类但被模型判定为负类的样本数量;Precision为模型判定为正类的样本中,真正例的比例,用于衡量正类预测的准确性;Recall也叫真正率,即在实际为正类的样本中,被模型正确判定为正类的样本所占比例,表示模型对正类的覆盖程度,TPR含义同召回率;F1为Precision和Recall的调和平均,取值范围为0~1;FPR为假正率,即实际为负类但被预测为正类的样本比例;;混淆矩阵用于直观展示分类模型预测结果与实际观测结果之间的对应关系。
ROC是以FPR为横坐标,TPR为纵坐标绘制的曲线,反映模型在不同阈值下的性能表现;AUC表示ROC下的面积,取值范围为0.5~1.0,数值越大表示模型性能越好;宏平均是对每个类别分别计算AUC后取算数平均,能够反映各类别的整体表现;微平均是将所有类别的混淆矩阵元素相加,计算总体的TPR和FPR,进而得到微平均AUC。
2.4 最优模型选择
通过对比4类算法在测试集上的性能,结果表明SVM的各项评估指标上均表现最佳(表4),因而被确定为最终模型。
表4 各种模型评估指标
Tab.4
| 模型 | 准确率 | 精确率 | 召回率 | F1分数 | 均值 | 综合排名 |
|---|---|---|---|---|---|---|
| 支持向量机 | 0.94 | 0.85 | 0.78 | 0.81 | 0.85 | 1 |
| 逻辑回归 | 0.89 | 0.63 | 0.60 | 0.61 | 0.68 | 2 |
| 决策树 | 0.88 | 0.49 | 0.46 | 0.46 | 0.57 | 3 |
| 随机森林 | 0.88 | 0.46 | 0.41 | 0.41 | 0.54 | 4 |
2.5 支持向量机在各分类上的评估
评估结果如图4所示,训练集的表现整体优于测试集。性能指标中,测试集的分类2、3、9表现最好,分类8和1表现最差;混淆矩阵主要数值集中在对角线上,表明模型整体分类效果良好,测试集上,分类2、3、9表现最好,分类8和1表现最差;微平均和宏平均AUC均在0.98以上,进一步表明模型整体性能优异。测试集的各分类中,AUC均在0.95以上,其中分类2、9、3表现最佳,分类8和1表现最差。
图4
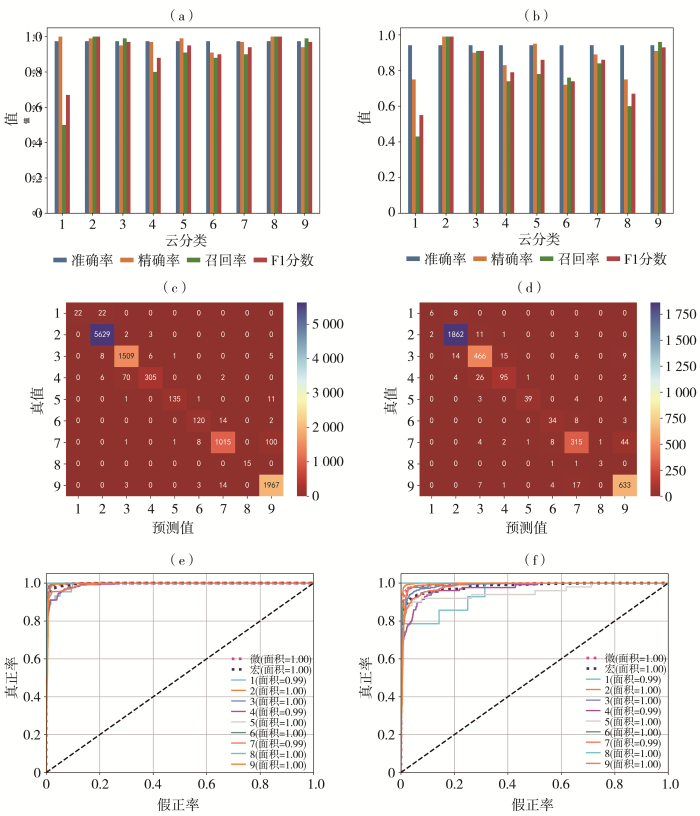
图4
支持向量机模型9类云训练集(a、c、e)和测试集(b、d、f)的分类性能指标(a、b)、混淆矩阵(c、d)和ROC(e、f)
Fig.4
Classification performance metrics (a, b), confusion matrix (c, d), and ROC curves (e, f) of the SVM model for the 9-class cloud dataset on the training set (a, c, e) and test set (b, d, f)
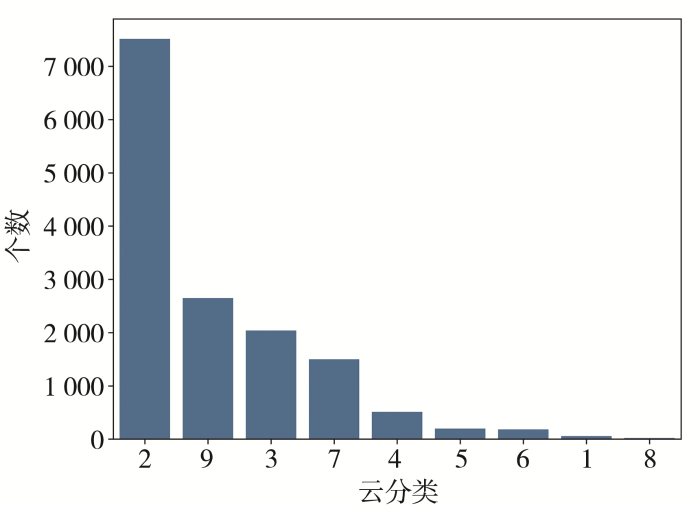
综上,支持向量机在各分类上的整体表现良好。其中,分类效果最佳的是2、9、3类,最差的是8和1类。由图5可见,分类2、9、3样本数量最多,分类8和1样本数量最少。样本数量与分类效果高度一致,即样本数量越多,分类效果越好;反之则越差,表明模型在各类别的分类效果与样本数量成正比。
图5
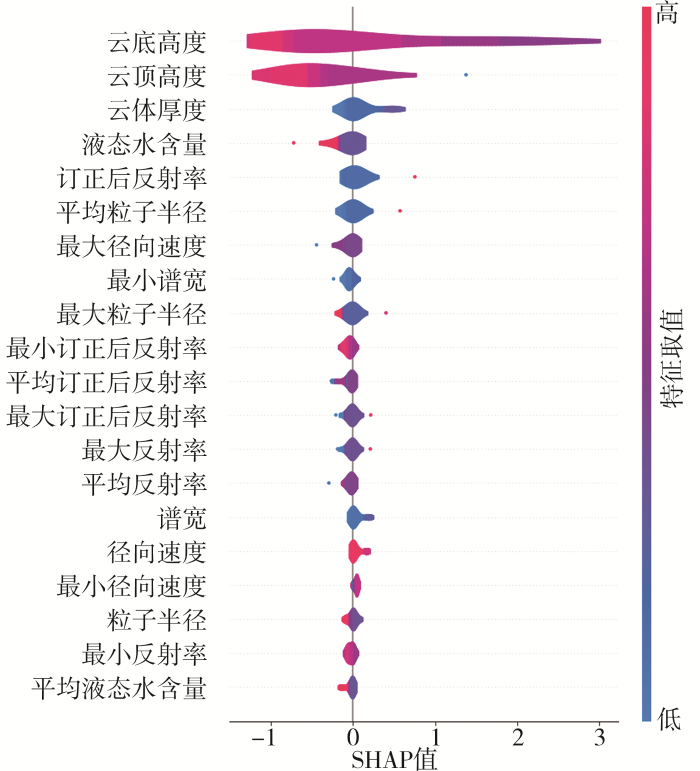
2.6 特征量重要性评估
进一步采用夏普利可加性解释(SHapley Additive exPlanations,SHAP)方法对支持向量机进行特征量重要性评估(图6),排名前5的特征量依次为云底高度、云顶高度、云体厚度、液态水含量以及订正后反射率,表明几何结构和微物理特征在云分类中起关键作用。
图6
3 效果检验
为验证模型在实况数据中的适用性,开发了“基于人工和地基器测数据的AI云分类系统”。该系统将毫米波云雷达、全天空成像仪等设备获取的历史与实时数据存储于后台数据库,并通过前台调用AI模型实现云分类功能。系统可连续输出时间分辨率为20 s的云分类产品。张掖外场典型日AI云分类和毫米波云雷达反射率因子如图7所示,实况云状以地面自动站观测数据作为参照标准。2024年5月17日06:00—08:00,模型识别出2层云,低层主要为高积云、积云和层积云,并随时间发生转化,高层为卷云;实况观测到高积云和层积云,整体与模型结果基本一致。2024年9月4日14:00—16:00,模型识别出3层云,低层为积云,中层为高积云,高层为卷云(其中少量层积云属于分类误差);实况观测为积云和高积云,未出现卷云,推测为低层云遮挡所致,模型整体与实况相符。2024年7月18日15:00—17:00,模型在低层识别出降水和积云,在中高层识别出高层云、高积云和卷云;实况显示降水、高积云、高层云和积云,未观测到卷云,整体与模型结果基本一致。2024年7月18日18:00—20:00,模型识别出降水、积云和高积云,且反映出云底高度随时间逐渐升高、降水天气逐渐结束的过程,与实况观测完全一致。
图7
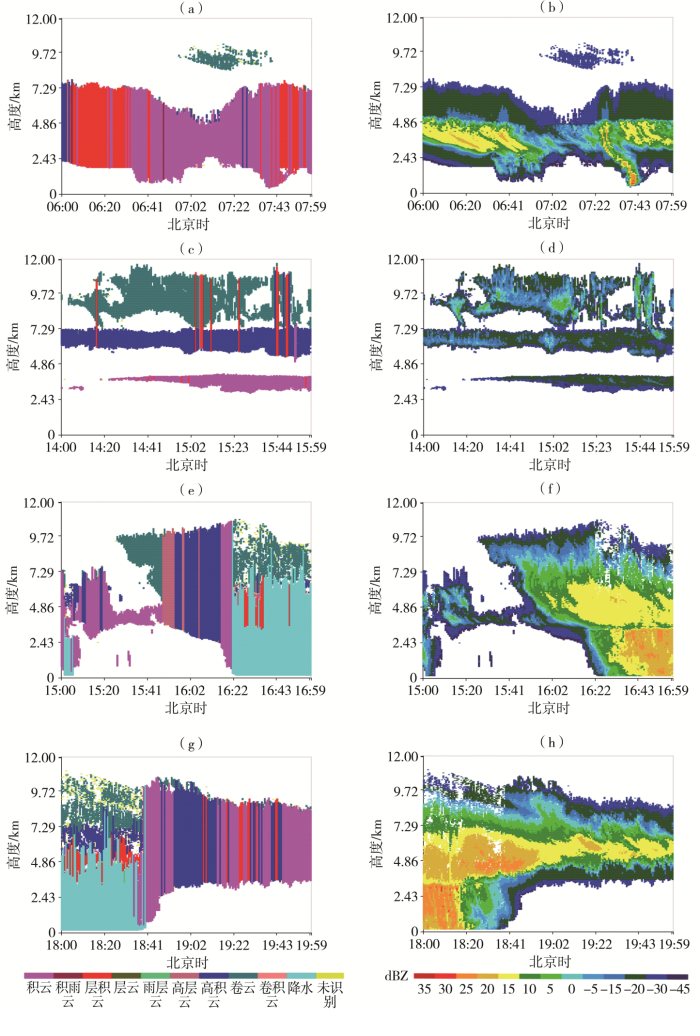
图7
张掖外场2024年5月17日06:00—08:00(a、b)、9月4日14:00—16:00(c、d)、7月18日15:00—17:00(e、f)及7月18日18:00—20:00(g、h)AI云分类(a、c、e、g)和毫米波云雷达反射率因子(单位:dBZ)(b、d、f、h)
Fig.7
AI-based cloud classification (a, c, e, g) and millimeter-wave cloud radar reflectivity factors (Unit: dBZ) (b, d, f, h) from the Zhangye field campaign during the periods of 06:00-08:00 on 17 May (a, b), 14:00-16:00 on 4 September (c, d), 15:00-17:00 on 18 July (e, f), and 18:00-20:00 on 18 July (g, h), 2024
4 讨论和结论
4.1 讨论
基于以上个例和系统性分析,发现毫米波云雷达可探测到最多的云层信息,地面自动站次之,人工观测最少,三者存在明显的层次性包含关系。说明自动站数据可作为人工观测的有效补充,甚至在部分情景下替代人工观测用于云分类标注。地面自动站与人工观测结果具有较高一致性,而人工观测的标注成本较高,因此利用自动站数据进行云分类标注具有可行性和效率优势,尤其适合大范围、长时序研究。样本数量不均衡明显影响分类效果,样本数量较少的云类识别效果较差,验证了样本均衡性对模型训练的重要性,在构建AI样本库时,应尽可能保证各分类样本均匀分布,以提高模型泛化能力。弱降水条件下,雷达探测的“云底”往往实际为“雨底”,易引起分类偏差。本研究提出将云和降水分开识别,并规定当云底高度低于200 m时统一识别为降水,以改善识别精度,但该阈值仍需进一步优化。单部雷达的一致性问题影响较小,但在未来多部雷达或跨厂家设备融合研究中,回波强度差异可能对分类结果产生显著影响,需要开展一致性校准与评估。
4.2 结论
本文基于2023年5月1日至2024年4月30日张掖外场的毫米波云雷达和全天空成像仪资料,结合人工和地面自动站观测的云状及天气现象,通过“确定云状分类、特征量提取、辅助资料提取、样本筛选、样本标注”等步骤,构建了多源融合的AI样本库。采用支持向量机、逻辑回归、决策树、随机森林4种算法进行训练和评估对比,最终确定支持向量机为最优模型。该模型可实现卷积云、卷云、高积云、高层云、雨层云、层云、层积云、积雨云、积云9类云状及降水天气的自动识别,准确率、精确率、召回率、F1分数分别达0.94、0.85、0.78和0.81。与已有研究相比,云状识别种类提升约33%,准确率提高约15%(余安安等,2021;喻皓,2024)。基于该模型开发的“基于人工和地基器测数据的AI云分类系统”进一步验证了其应用效果,结合地面自动站数据的典型个例分析表明,模型能够准确识别垂直方向上的多层云结构,有效弥补了“天气现象视频智能观测仪”纯视觉识别的不足。
相比CNN视觉识别方法(喻皓,2024),本文模型通过引入毫米波云雷达数据,显著改善了对云垂直结构的探测能力;在多源数据融合方面,也较BP神经网络更具优势,能够整合多类观测数据以增强模型泛化能力。尽管BP神经网络具备自动特征提取的优点,但在样本数量有限时其学习效果较差;本文通过人工特征提取结合多算法对比选择的方法,提升了模型的稳定性与适应性。
综上所述,本文在数据融合和方法论上均有明显改进,在云状识别种类、识别精度以及时间分辨率方面均较现有方法有显著提升,具备较高的业务化应用潜力。但由于研究基于单站资料,样本规模和空间分布存在局限,未来仍需通过引入更多站点及更长时间序列的数据,进一步优化模型性能,并最终实现对《地面气象观测规范》(全国气象仪器与观测方法标准化技术委员会,2017)中10属云状的全面自动识别,为构建面向未来的智能化云观测系统提供参考。
参考文献
毫米波云雷达在高影响天气中的预警应用
[J].
为提高城市高影响天气的精细化预报预警水平,利用雄安新区2020年1月—2023年12月容城气象站Ka波段毫米波云雷达反射率因子、径向速度等7种产品及地面气象资料和天气学、雷达回波图像形态分析等方法对雄安新区暴雨、大风、雾、霾及沙尘等高影响天气进行分析。结果表明:1)云雷达对含降水的高影响天气云体探测结构清晰、垂直分布特征直观。当春、夏、秋季回波强度≥21 dBZ(冬季≥15 dBZ)、伸展高度≥5 km(冬季≥2 km)的云体出现,且云体最低高度达150 m时,可看作地面降水将出现的特征指标,时间提前量平均达20 min左右,当回波强度减弱、云底高度抬升,降水趋于结束;各级降水中,暴雨的强回波伸展高度、云水含量等最大。2)当回波顶伸展高度达8 km之上而后快速下落至云顶高度≤2 km时,地面易出现8级以上大风,降水伴大风的回波特点为强回波区中形成明显的U或V型缺口,缺口区最大径向速度达12.5 m·s<sup>-1</sup>左右。3)云雷达反演滴谱数据产品可较好反映各级降水的粒子分布特征;垂直积分液态水含量(Vertically Integrated Liquid Water,VIL)对降水伴大风有预警指示意义,提前量0~30 min或以上。4)非含降水的高影响天气(雾、霾、沙尘等),云雷达回波强度等整体偏弱,各天气现象之间界限不清晰,但与降水天气发生转换时云雷达能快速、清晰地探测出降水云体,有利于提升降水的精细预报预警能力。
基于多源观测资料对张家口一次雨雪天气降水相态特征的分析
[J].利用ERA5再分析资料及云雷达、微波辐射计和SA双偏振多普勒雷达等多源观测资料,分析2020年11月17—19日张家口地区一次雨雪天气的降水相态演变特征。结果表明:在高空低槽、中低层低涡与地面倒槽配合下,高空槽后西北气流引导冷空气南下造成气温迅速下降,导致降水相态变化。过程前期整层大气均为强暖平流,且地面气温较高,降水相态为雨。18日傍晚冷平流发展强烈,各层温度迅速降低,整层变为冷层,导致降水相态转换为雪。散度和垂直速度的诊断表明降雨时段的动力强迫主要位于高层,降雪时段则主要位于低层。云雷达高分辨率资料可以反映0 ℃层变化,大于10 dBZ的质心变化可以指示降水强度变化,降雨时的基本速度最大可达6~8 m·s<sup>-1</sup>,而降雪时则小于 2 m·s<sup>-1</sup>。微波辐射计高分辨率时空资料可以准确判断雨雪转换时间,降水开始之前3~5 h积分水汽含量出现跃升与峰值。双偏振雷达和微波辐射计结合可以对降水粒子相态实现准确判断,可用于降水相态转换的临近预报。
应用FY卫星产品分析陇东半干旱区特大暴雨事件云特征
[J].降水与云的发生发展密切相关,研究强对流云特征,对降水机理分析、降水监测和预报具有重要意义。2022年7月15日地处西北半干旱区的甘肃陇东出现一次特大暴雨过程,多站日降水量和小时降水量均突破历史极值,本文基于FY-4A、FY-4B静止卫星扫描成像辐射计(advanced geostationary radiation imager, AGRI)数据,FY-3D极轨卫星微波湿度计(micro-wave humidity sounder, MWHS)和微波温度计(micro-wave temperature sounder, MWTS)融合产品,分析此次特大暴雨事件中云宏微观特征、云系演变特征及大气环境条件。结果表明:(1)暴雨云系的云顶类型为过冷水云、混合云、不透明冰云和多层云等,发生强降水的云顶类型以不透明冰云为主,云顶高度达14 km以上;暴雨云系云体深厚,主要为小粒径冰云且伴有强烈上升气流。(2)此次暴雨事件存在对流云团新生、合并及加强过程,对流云团稳定维持是导致特大暴雨发生的主要原因,降水与云顶相当黑体亮温(black body temperature, TBB)及其变化的关系密切,TBB低值区对应强降水,且强降水发生前TBB迅速下降。(3)强降水发生前大气层结表现出浅层对流不稳定的特征,中低层强烈增湿是对流不稳定发展的主要原因,低层绝对湿度的差异造成了不稳定条件及降水量级的差异。
基于毫米波云雷达的黄河流域内蒙古段云宏观特征分析
[J].云是地-气系统的重要组成部分,云宏观特征不仅与地-气系统的辐射收支及区域气候变化密切相关,还直接影响云降水过程模式预报的准确性,鉴于此本文基于2020年8月至2021年7月呼和浩特地区毫米波云雷达观测数据,对黄河流域内蒙古段云出现频率及垂直结构进行统计分析。结果表明:该地区多以晴空为主,全年晴空廓线超过了云雷达总采样廓线的70.00%,相比而言,云出现频率较小,6月最高值也仅为43.84%。云类型以中高云为主,云底高度多出现在3.00~4.00 km之间,云层较薄,厚度介于0.50~1.00 km的云出现频率最高。云宏观属性存在明显的季节变化和日变化特征,春季和夏季云的出现频率较高,分别为39.71%和35.77%,冬季云的出现频率最小,春、夏、秋季午后云出现频率明显高于上午时段。
特征选择方法综述
[J].特征选择作为一个数据预处理过程,在数据挖掘、模式识别和机器学习中有着重要地位。通过特征选择,可以降低问题的复杂度,提高学习算法的预测精度、鲁棒性和可解释性。介绍特征选择方法框架,重点描述生成特征子集、评价准则两个过程;根据特征选择和学习算法的不同结合方式对特征选择算法分类,并分析各种方法的优缺点;讨论现有特征选择算法存在的问题,提出一些研究难点和研究方向。
基于分数维与灰度梯度共生矩阵的气象云图识别(Ⅱ):灰度梯度共生矩阵对纹理统计特征的描述
[J].
多源遥感数据在北京春季沙尘天气监测中的应用评估
[J].利用2021年春季影响北京的3次沙尘(暴)天气过程(3月15日、28日和4月15日)中激光雷达、激光云高仪和云雷达3种遥感探测设备的探测数据,北京4个国家气象站能见度观测及北京市生态环境监测中心PM<sub>10</sub>监测数据,综合分析3种遥感探测设备对沙尘监测的特点及优劣,以期提高沙尘天气预报预警技术。结果表明:激光雷达的消光系数和退偏振比可以较准确地区分沙尘气溶胶和大气污染物,在边界层和对流层中下层沙尘表现为高消光系数(>0.30 km<sup>-1</sup>)和高退偏振比(>10%);云高仪的近地面后向散射系数、云底高度与PM<sub>10</sub>质量浓度、能见度变化有较好的对应关系,也能通过近地面后向散射系数的陡增和云底高度的下降来判断沙尘沉降;云雷达能探测到边界层(0~2 km)内的沙尘和对流层中上层(6~10 km)的沙尘云,且能探测垂直速度。综合来看,激光雷达是3类遥感探测设备中唯一能够区分沙尘和大气污染物的设备;云高仪在近地面层对沙尘的监测效果较好,且能够判断沙尘的持续时间;云雷达的探测距离最远且能探测垂直速度。
Study on the clouds detected by a millimeter-wave cloud radar over the hinterland of the Taklimakan Desert in April-June 2018
[J].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}