

引言
对流泡是生成于层状云或积层混合云顶部的对流单体,其内部雨核在降水形成过程中起关键作用(Plank et al.,1955)。对流泡内存在较强上升气流,可不断向高层输送水汽,过冷水含量充沛(Ikeda et al.,2007),具有一定的增雨潜力。对流泡的水平尺度通常在15~30 km,生命周期约17 min(Hobbs and Locatelli,1978;张佃国等,2020),冬季对流泡发展较弱,水平尺度约0.5~2 km(Rosenow et al.,2014)。对流泡尺度小、持续时间短,其内部降水粒子浓度、尺度和形状等微物理参数变化复杂,使得对其分析研究充满挑战。目前,国内外的对流泡分析研究主要集中于云滴、冰晶、液态水含量和冰水含量等微物理参数,对对流泡降水粒子的形状分类及精确占比统计方面的研究尚不充分。例如,Hobbs and Locatelli(1978)提出对流泡不同部位主要冰晶形状的分布概念模型,但对不同降水粒子的具体占比情况及相应的增长机制缺乏详细研究。
飞机穿云观测是获取云内微物理参数和云结构信息的有效手段(庞朝云等,2013;李宝东等,2014)。机载探测设备中的粒子图像探头(Cloud Imaging Probe,CIP)用于识别和记录粒子图像信息。然而,传统的降水粒子形状分类方法(Heymsfield and Parrish,1979;Rahman et al.,1981;Holroyd,1987)主要依靠人工提取图像特征,通常采用浅层次结构模型,准确率有待提高。深度学习技术的崛起为图像识别提供了新的可能(Hinton and Salakhutdinow,2006;朱文刚等,2020;袁凯等,2023),通过构建多层网络,可自动获取降水粒子更高维、更抽象且更具表达力的特征。在深度学习中,卷积神经网络因其出色的表现而备受关注,其通过提取图像的局部像素特征并在更高层上进行整合获得丰富的图像特征信息。传统的卷积神经网络利用加深网络层数来优化网络,例如:AlexNet(Krizhevsky and Sutskever,2015)采用双GPU网络结构增加网络深度;VGG网络(Simonyan and Zisserman,2014)利用堆叠卷积块加深网络层数以增加网络的非线性表达能力;ResNet(He et al.,2016)通过残差块(residual block)的堆叠,设计出不同层次类型的网络。深层的卷积网络能够捕获更加丰富的图像特征,但随着网络深度加深,性能收益逐渐变小。EfficientNet是由google使用神经网络架构设计的网络模型,不同于传统卷积神经网络的单一维度优化思路,EfficientNet对网络深度、宽度以及图像分辨率三个维度进行协同扩展,找到优化的平衡性扩张,达到高效率和高性能的双重收益。
为提高对流泡降水粒子分类的准确性,本文构建了山东省降水粒子图像数据集(Shandong Province Precipitation Particle Image Dataset, SD-PPID),并搭建了基于EfficientNet卷积神经网络的降水粒子识别模型(A Precipitation particle Recognition model based on EfficientNet convolutional neural Network,PREN)。通过多模型、多指标的评价对比实验,确定最优网络结构,以避免过深和过宽的网络所带来的梯度消失和大型网络过拟合问题。选取山东省2018年4月22日和2019年4月27日两次降水过程中的三个时段,使用PREN分析对流泡,结合机载Ka波段云雷达(Airborne Ka-Band Precipitation Cloud Radar,KPR)和DMT(Droplet Measurement Technologies)粒子测量系统,分析对流泡内部和外部、不同强度和不同高度的降水粒子形状占比,并统计降水粒子尺度特征,以揭示对流泡内降水粒子的增长演变机制。
1 资料与方法
1.1 仪器简介
1.2 图像数据集构建及预处理
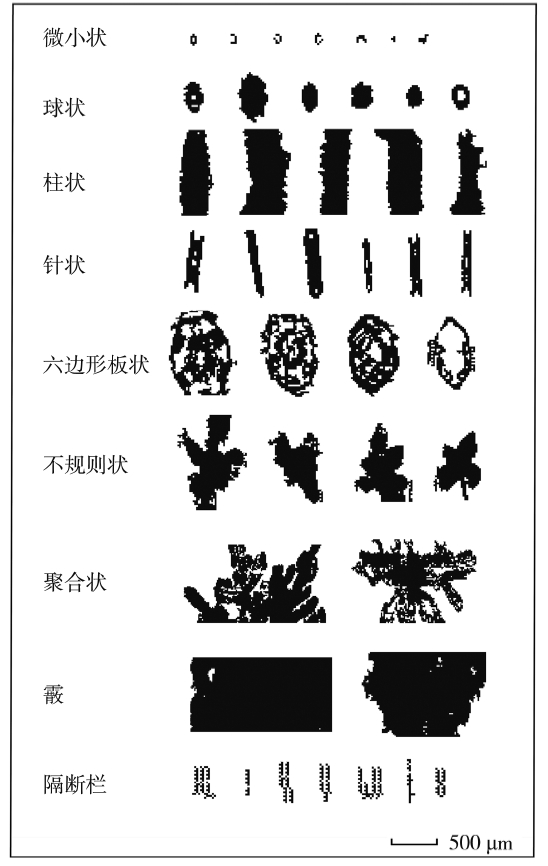
在进行卷积神经网络监督学习时,需要构建足够多具备标签标识的数据集。目前国内外尚无公开标注的CIP图像数据集,本文采用的图像均为自主收集。由于受单次飞行高度和云系的限制,无法涵盖所有粒子形态。故选取2018—2020年间10个架次的粒子图像进行标注,构建SD-PPID。所取的10个架次涵盖了弱降水云、层状云和积层混合云的探测,最大高度6 800 m,最低温度-21 ℃,降水粒子种类丰富。Holroyd(1987)将降水粒子分为9类,王磊等(2014)在此分类基础上根据经验做了适当修正,将降水粒子分为8类。本文基于山东省降水云系中不同粒子的形状、尺度和面积等特征,参照以上2种分类标准,将粒子分为8类进行标注,每类包含300张带有标签的粒子图像,第9类隔断栏是降水粒子之间的分割标识,同样选取300张进行标注。图1为粒子及隔断栏典型图像。微小状粒子像素总数小于25,呈点状分布在各种降水云系中;球状粒子整体呈圆球形分布,当探头聚焦出现问题时,粒子内部呈空心白色,部分球状粒子边缘粗糙或呈椭球形分布,Holroyd(1987)的分类中球状粒子并非严格意义的圆球状,允许有一定偏差;柱状粒子与针状粒子外形均为长条状分布,柱状粒子宽度通常为针状的3~5倍;六边形板状粒子像素总数较大,呈六边形规则分布,边缘光滑无凸起;不规则状粒子边界无特定规律,边缘有多个凸起,呈花结状分布,由几个单体呈花瓣状围绕一个中心碰并形成;聚合状粒子像素总数大,边缘呈辐枝状分布,多个冰晶相互碰并粘连;霰粒子像素总数大,内部密实,由于尺度较大超出探头量程,无法记录粒子整体形状;隔断栏纵向规则排列,在探头拍摄降水粒子时,会用隔断栏将粒子间隔开,因此在分割粒子图像时,隔断栏也会被记录下来,如果不加以识别剔除,隔断栏会被错误识别为针状粒子,影响结果的分析。在分割粒子图像时,部分隔断栏会出现未能被完整的记录裁切,导致破碎的情况,因此需要单独建立一个类别标签并进行训练识别。
图1
为增强卷积神经网络的泛化能力和鲁棒性,对2 700张带有标签的图像进行预处理。首先将所有图像完全打乱并统一剪裁,确保每张图像分辨率为224×224,随后通过随机反转、角度旋转等方式进行数据增强,最后用平均值和标准偏差归一化图像,将图像数据集进行标准化。
1.3 算法模型
1.3.1 模型介绍
深度学习是一种包含多级非线性变换的层级机器学习方法,其中卷积神经网络具有局部神经元连接和池化平均等特性,可有效减少训练参数从而降低网络复杂度,同时提高网络的鲁棒性,具备较强容错能力。考虑到降水粒子的多样性和复杂性,引入多维度混和的模型放缩方法,用以构建PREN模型,以提高卷积层提取不同层次图像信息的性能。
为获得更好的图像识别结果,通常需要在网络深度、网络宽度和图像分辨率三个维度上进行调整和优化。单一追求网络深度可能会导致梯度消失;而追求网络宽度可能会忽略深层次的图像特征;追求更高的图像分辨率可能会造成计算成本显著增加。EfficientNet网络不同于以往的卷积神经网络,其同时优化了网络深度、宽度和图像分辨率三个维度,实现了三个维度之间的平衡从而达到网络性能的最优化(Tan and Le,2019)。
结合EfficientNet网络深度可分离卷积结构并强化学习策略,构建PREN模型[图2(a)]。该模型将经过1×1卷积核粒度特征粗提取的卷积层降水粒子,通过16个有序堆叠的移动翻转瓶颈卷积网络(mobile inverted bottleneck convolution,MBConv)提取局部深层次图像特征。具体过程包括:重复一次卷积核为3×3的MBConv1、重复两次卷积核为3×3的MBConv6、重复两次卷积核为5×5的MBConv6、重复三次卷积核为3×3的MBConv6、重复三次卷积核为5×5的MBConv6、重复四次卷积核为5×5的MBConv6、重复一次卷积核为3×3的MBConv6,通过多次卷积运算获得不同大小的特征图,从而挖掘丰富的图像特征。MBConv的具体结构如图2(b)所示,主要由两个1×1的普通卷积、一个K×K的Depthwise Conv卷积和一个Droupout层构成。此外,还引入了SE(Squeeze-and-Excitation)通道注意力机制,以关注输出通道特征信息,增强网络输出特征,提高网络特征提取能力。最后使用平均池化层汇总特征图的像素值,从而在保留重要特征的同时考虑有关池中“次重要”的特征信息。最后通过全连接层分类输出9类通道,构建对流泡降水粒子识别模型。
图2
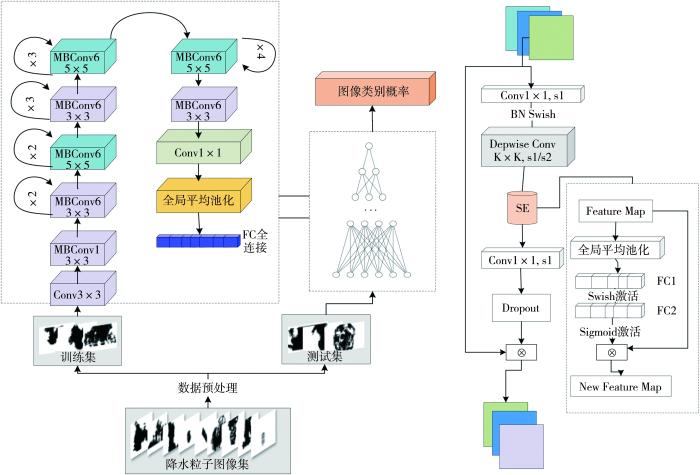
图2
PREN模型(a)和 MBConv结构(b)
Fig.2
PREN model (a) and structural diagram of MBConv (b)
1.3.2 实验配置及评价参数
实验在Windows10操作系统下进行,使用搭载8核8线程的Intel(R) Core(TM) i7-9700CPU,主频为3.00GHz,内存为16G的主机。深度学习环境为Anaconda Python3.7+PyTorch1.7.1+CUDA框架。选择的网络模型为EfficientNet-B0,参数配置为width_coefficient=1.0、depth_coefficient=1.0、drop_connect_rate=0.2。模型初始化参数源自ImageNet大型数据集的迁移学习。学习率设置为0.0001,批处理大小设置为16,以减少计算量。Softmax分类层的输出维度为9,dropout_rate设置为0.2,以避免过拟合。
基于EfficientNets网络的降水粒子识别模型属于多分类模型,其中准确率是最常见的评价指标之一,反映模型正确识别测试样本的能力。测试集和验证集均可表示为
以二分类为代表的模型混淆矩阵如表1所示。TP代表正例样本被识别为正例的个数;FN代表正例样本被识别为反例的个数;FP代表反例样本被识别为正例的个数;TN代表反例样本被识别为反例的个数。使用9×9混淆矩阵来评价模型识别能力。基于混淆矩阵,计算精准率Pre(precision)、召回率Re(recall)、样本总体精度微平均MiPre(Micro-averaging)、总体精度宏平均MaPre(Macro-averaging)、总体召回率宏平均MaRa(Macro-averaging)和F1-score Squeeze-and-Excitation等参数综合评价模型性能(周志华,2016)。降水粒子共分为9类,每一类粒子i的精准率和召回率分别表示为
2 结果与分析
2.1 模型实验结果分析
实验采用交叉验证方式。首先打乱所有图像顺序,随机挑选数据集中80%的图像作为训练集,对模型进行训练,剩下的20%作为验证集,用于验证模型的性能。迭代次数设置为50次。为减小初始化参数对实验结果造成的不稳定,实验结果均为运行10次的平均值。
从实验结果(图3)可看出,随着模型迭代次数增加,模型准确率逐渐提高。迭代至第30次时,验证集准确率达95.4%。上述结果表明,模型可从图像中学习到深层次及浅层次的特征,从而准确识别不同类别的降水粒子。图4(a)为前30轮迭代验证集中每类粒子准确率的变化,可看出,随着迭代次数增加,训练集在网络中传递多次并不断更新模型参数权重,验证集中识别的准确率虽有不同程度波动,但曲线逐渐升高并趋于平稳,这说明模型对深层次特征挖掘更充分,训练模型的准确率和稳定性都在不断提高。训练网络的目标是通过优化神经网络参数权重以最小化损失,随着迭代次数的增加,损失值持续下降并趋于稳定,表明模型在不断学习和更新网络参数权重并逐渐达到最优状态[图4(b)]。
图3
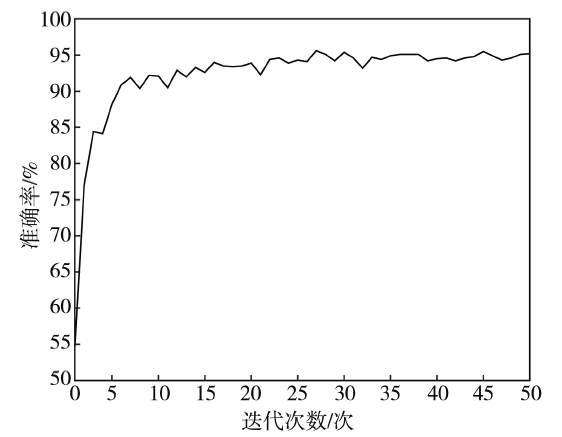
图4
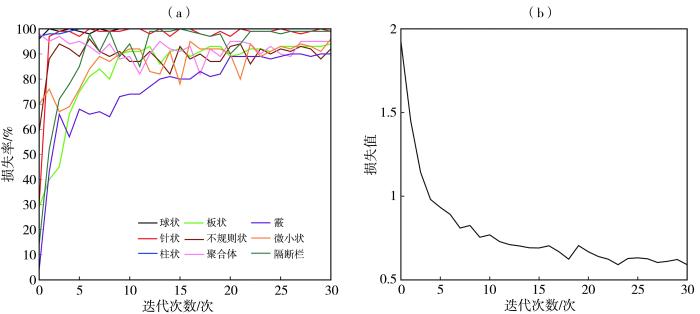
图4
各类粒子的准确率(a)和损失值(b)的模型训练实验结果
Fig.4
Results of model training experiments for accuracy (a) and loss values (b) for each type of particle
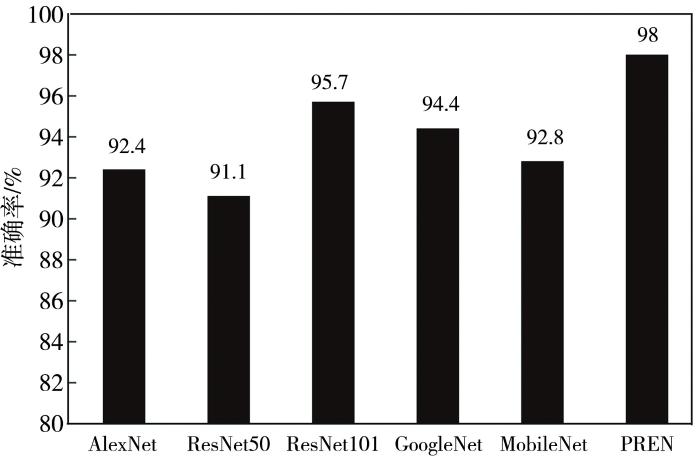
为评估PREN模型的性能,选取AlexNet模型、ResNet50模型、ResNet101模型、GoogleNet模型和MobileNet模型等5种典型卷积神经网络与PREN模型进行对比实验。使用相同的SD-PPID训练集对5种模型进行训练,并整理450张没有训练过的图像作为测试集,每类图像测试集为50张。因实验在30次迭代后准确率趋于稳定,为节省计算资源,将对比实验迭代次数设为30。与其他5种模型相比,PREN模型的识别准确率最高,达98%(图5),验证了模型的有效性。
图5
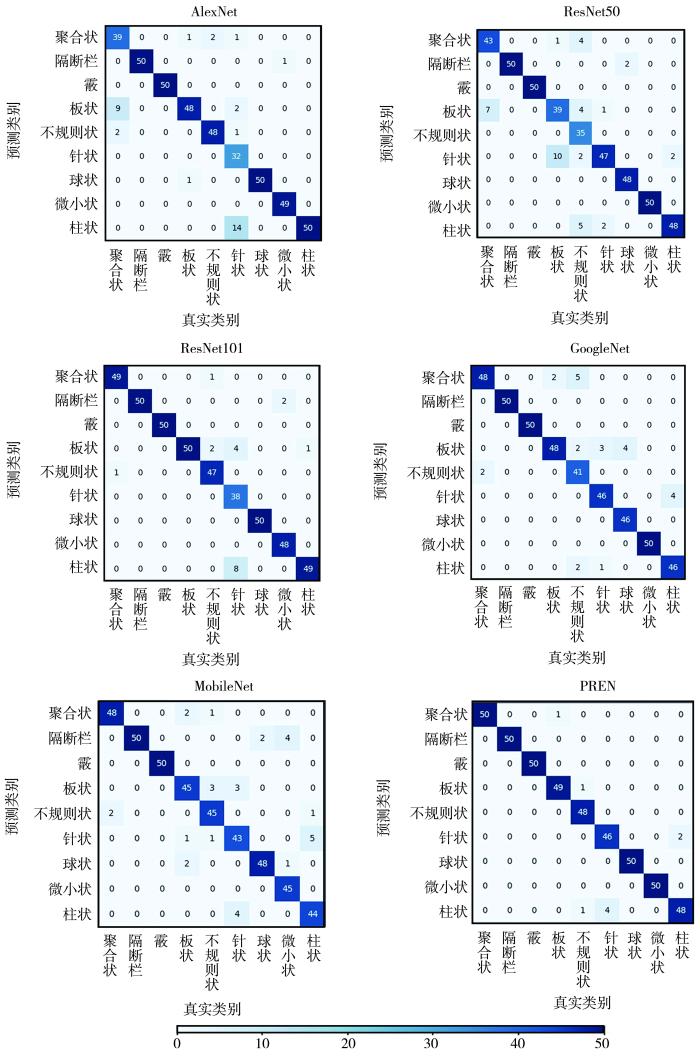
在对比实验中,基于SD-PPID训练各模型并通过测试集进行测试,得到各模型的混淆矩阵(图6)。混淆矩阵中的对角线表示真实类别和识别类别一致,颜色越深表明识别效果越好。在混淆矩阵中可清楚看到每个类别的正确和错误的识别数量。各模型对隔断栏、霰、球状和微小状粒子均识别较好。AlexNet、ResNet50和ResNet101模型对针状粒子的识别误差较大,分别有14、6和8个针状粒子被误识别为柱状粒子;GoogleNet模型对不规则状、球状和柱状粒子识别不稳定;MobileNet模型对不规则状、针状、微小状和柱状粒子识别不敏感。这些表明模型对图像特征挖掘不充分,学习到的特征信息不完整。由于针状和柱状粒子形状极为相似,PREN模型识别时存在少许偏差,除此之外,PREN模型识别准确率最高。
图6
基于混淆矩阵统计的各模型性能参数如表2所示。PREN模型的各参数MiPre、MaPre、MaRa、F1-score均优于其他模型,达98%,表明该模型能够充分提取图像的特征向量,学习到降水粒子丰富的特征信息,具有较好的鲁棒性和泛化能力,多维度混和的模型放缩方法能有效对降水粒子进行分类。
表2 不同参数对不同模型性能综合评估表
Tab.2
| 模型 | MiPre/% | MaPre/% | MaRa/% | F1-score/% |
|---|---|---|---|---|
| AlexNet | 92.4 | 93.3 | 92.4 | 92.8 |
| ResNet50 | 97.5 | 97.7 | 97.5 | 97.5 |
| ResNet101 | 95.7 | 96.2 | 95.7 | 95.9 |
| GoogleNet | 94.0 | 94.7 | 94.0 | 94.3 |
| MoblieNet | 92.8 | 93.0 | 92.8 | 92.8 |
| PREN | 98.0 | 98.0 | 98.0 | 98.0 |
2.2 对流泡特征分析
2.2.1 天气背景及飞行概况
2018年4月22日08:00(北京时,下同),500 hPa东亚地区环流经向度小,槽脊发展程度较弱,北支槽位于蒙古国上空,华北到黄淮地区受弱短波槽控制,南支槽位于西南地区。地面从西南地区至江淮地区有宽广的倒槽发展,并于22日17:00形成江淮气旋,气旋中心位于长江口附近,中心气压低于1 007.5 hPa。受地面倒槽影响,山东地区自21日下午开始产生降水,22日逐渐演变为气旋降水。4月22日组织实施增雨飞行1架次,飞机于09:38从济南国际机场起飞,升至660 m入云,向西南方向继续爬升。09:50升至4 900 m时接近云顶,舱外温度-4.3 ℃,飞机进行平飞并开始播撒作业,11:03飞至蒙阴上空结束作业并返航。11:26于本场上空510 m出云,11:28飞机落地。结合地基雷达观测,确定飞行时段内探测云系处于降水成熟到消散阶段。
2019年4月27日08:00,500 hPa东亚地区以纬向环流为主,槽脊较弱。浅槽位于内蒙至河南一带,逐渐东移影响山东。20:00,鲁西北地区700 hPa存在弱切变,整层受到西南气流的影响,相对湿度达95%。4月27日组织增雨飞行1架次,飞机于13:46在济南国际机场起飞,3 000 m高度入云,随后向正西方向攀升至5 850 m进行平飞探测,期间开始播撒作业,舱外温度-8.8 ℃,15:42作业结束飞机返航,15:51飞机落地。结合地基雷达观测,确定探测云系处于降水发展到成熟阶段。
2.2.2 对流泡内外降水粒子特征分析
图7
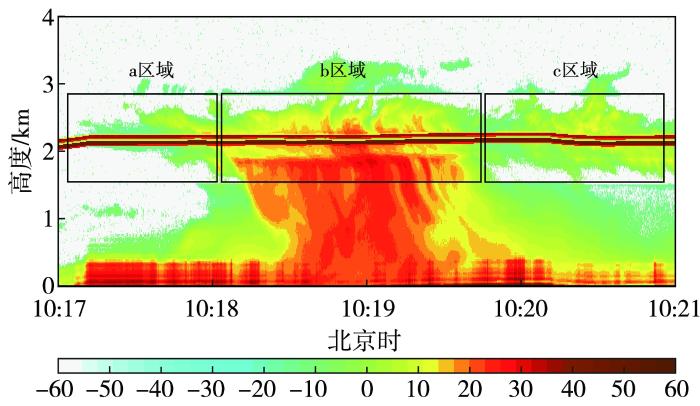
图7
2018年4月22日10:17—10:21降水消散阶段云雷达回波图(单位:dBZ)
(红色双实线为飞行轨迹。下同)
Fig.7
Cloud radar echo of precipitation dissipation stage from 10:17 to 10:21 on 22 April, 2018 (Unit: dBZ)
(The red double solid line shows the flight path. Same as below)
利用PREN模型分类统计图7中a、b、c区域内降水粒子种类分布,由于微小状粒子对降水贡献小且数量庞大,会掩盖其他降水粒子的特征,因此不计入统计结果。统计结果显示(图略),对流泡内部(b区域)7种形状的粒子均有,其中球状粒子占比超过一半,针状、柱状和不规则状粒子占比均超过10%,六边形板状、聚合体和霰粒子占比较少,分别为2%、2%和1%。a区域仅有5种粒子,以球状粒子为主,其占比高达92%,此外有少量针状粒子,占7%,柱状、六边形板状和不规则状粒子数量极少,累计不足1%。c区域存在6类粒子,以球状粒子为主,占比达74%,针状和不规则状粒子次之,分别占13%和7%,少量柱状、六边形板状和聚合体粒子分别占3%、2%和1%。对流泡内部除球状粒子外,所有粒子占比均高于对流泡外部,说明对流泡内的动力和微物理参数有助于各类粒子的增长。
表3统计了三个区域飞机探测的云宏观和微观物理参数信息。三个区域均位于0 ℃层附近,以弱上升气流为主,最大垂直风速出现在a区域,上升气流风速为0.2 m·s-1,由于降水处于消散阶段,上升气流较弱,与前人的研究一致(Yang et al.,2016)。对流泡内液态水含量略高于对流泡外,但均低于0.01 g·m-3,液态水在降水消散阶段未得到有效补充。对流泡内云滴数浓度高于对流泡外,达16.1 cm-3,消散阶段不利于云滴增长,因此对流泡内外云滴尺度相当,云滴平均直径低于8 μm。粒子弦长是粒子在任意方向上的最大尺度,可精确反映粒子的尺度特征,用横纵坐标值进行最小二乘法拟合来计算粒子弦长(王磊等,2014;张荣等,2021)。b区域粒子平均弦长为367 μm,最大弦长为1 281 μm,高于a区域和c区域。a区域内针状粒子多以单体形式存在,没有相互攀附,因此平均弦长较小,为209 μm。c区域存在聚合体,最大弦长达1 223 μm。
表3 不同区域云宏观和微观物理参数信息
Tab.3
| 区域 | 云宏观和微观物理参数 | |||||||
|---|---|---|---|---|---|---|---|---|
| 高度/m | 温度/℃ | 垂直风速/ (m·s-1) | 液态水含量/(g·m-3) | 云滴浓度/cm-3 | 云滴平均 直径/μm | 粒子平均 弦长/μm | 粒子最大弦长/μm | |
| a | 4 330 | -0.3 | 0.2 | 0.002 | 11.2 | 6.1 | 209 | 756 |
| b | 4 333 | 0.1 | 0.19 | 0.007 | 16.1 | 7.4 | 367 | 1281 |
| c | 4 331 | 0.2 | 0.16 | 0.004 | 8.9 | 7.9 | 278 | 1223 |
2.2.3 不同强度对流泡降水粒子特征
图8
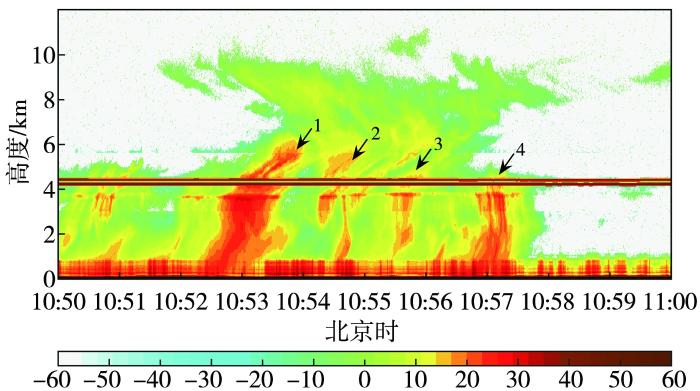
图8
2018年4月22日10:50—11:00降水成熟阶段云雷达回波(单位:dBZ)
Fig.8
Cloud radar echo of precipitation maturity stage from 10:50 to 11:00 on 22 April, 2018 (Unit: dBZ)
对图8中4个对流泡内的粒子进行识别和分类统计。与图7中b区域相比,图8对流泡内的霰粒子占比从1%增加到4%,针状粒子从15%增加到19%,球状粒子从57%减少为50%,其余粒子占比没有明显变化。霰粒子比例增加表明云内过冷水含量丰富,飞机飞行轨迹上测得液水含量最大值为0.18 g·m-3。云内动力条件较好,最大上升气流为0.82 m·s-1,受大粒子下沉拖曳影响,最大下沉气流为0.34 m·s-1。云体中上部上升气流与下沉气流并存是降水成熟阶段的重要标志(陈梓桐和李昀英,2022)。针状粒子比例增加与云体垂直发展有关,在Hobbs and Locatelli(1978)提出的对流泡内降水粒子形状分布模型中,针状粒子主要在0 ℃层亮带以上2 000 m处增长,图8中0 ℃层亮带(3 800 m高度处)到回波顶高间有6 000 m的云体发展高度,拓宽了针状粒子增长的温度区间。此外霰粒子凇附-破碎和冰粒子相互碰撞会产生大量小冰粒,这些小冰粒通过凝华增长可形成针状粒子(Heymsfield and Willis,2014),从而提高针状粒子占比。统计结果显示,对流泡内降水粒子的平均弦长为415 μm,最大弦长为1 223 μm,随着上升气流的增大,降水粒子在反复抬升、降落过程中增长,尺度增加(黄兴友等,2020)。
2.2.4 不同高度对流泡降水粒子特征
图9为2019年4月27日14:15—14:45飞机穿越不同高度对流泡的雷达回波图。探测云系处于降水发展阶段。d区域和e区域所在对流泡的发展程度不同,d区域强回波区集中在5 000~7 000 m高度,呈竖条状分布,发展较旺盛,e区域回波中心在4 000 m高度,回波较宽,水平范围更广。两区域底部和顶部高度不一致,在分析过程中对探测高度进行均一化处理。d区域所在对流泡的底部高度为1 500 m,顶部高度为7 000 m,探测高度为5 850 m,均一化高度为0.79,探测区域位于对流泡上部。e区域所在对流泡的底部高度为1 500 m,顶部高度为6 000 m,探测高度4 000 m,均一化高度为0.55,探测区域位于对流泡中部。对d和e区域的降水粒子进行采样,分别统计14:25—14:30和14:38—14:43两个时段的云微物理参数信息,分析不同高度对流泡降水粒子特征。
图9
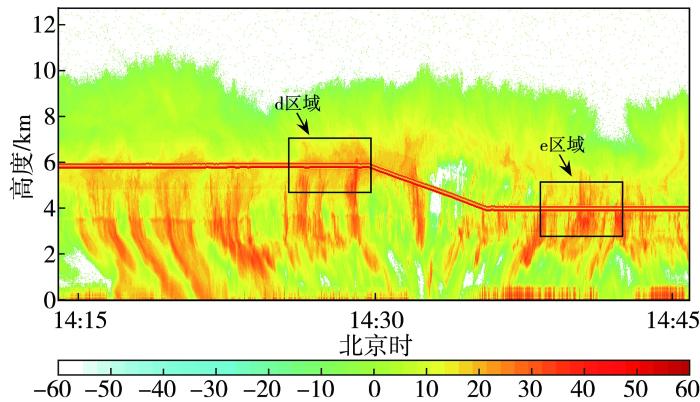
图9
2019年4月27日14:15—14:45降水发展阶段云雷达回波(单位:dBZ)
Fig.9
Cloud radar echo of precipitation developmental stage from 14:15 to 14:45 on 27 April, 2019 (Unit: dBZ)
表4列出了不同区域云宏观和微观参数信息。d区域位于-9 ℃层附近,以上升气流为主,垂直风速为0.97 m·s-1,e区域位于0 ℃层附近,上升与下沉气流并存,上升气流速度为1.1 m·s-1,下沉气流速度为0.82 m·s-1。d区域平均液态水含量为0.01 g·m-3,最大值为0.04 g·m-3。e区域平均液态水含量为0.03 g·m-3,最大值为0.11 g·m-3。d区域云滴体积浓度远低于e区域,但云滴平均直径较大,约为e区域云滴平均直径的2倍。液态水和云滴含量差异表明积层混合云内微物理参数垂直分布不均。
表4 不同高度云宏观和微观物理参数信息
Tab.4
| 区域 | 云宏观和微观物理参数 | ||||||
|---|---|---|---|---|---|---|---|
| 高度/m | 均一化高度 | 温度/℃ | 垂直风速/(m·s-1) | 液态水含量/(g·m-3) | 云滴浓度/cm-3 | 云滴平均直径/μm | |
| d | 5 850 | 0.79 | -9 | 0.97 | 0.01 | 7.3 | 19.02 |
| e | 4 000 | 0.55 | 0 | 升速:1.1 降速:0.82 | 0.03 | 125.5 | 11.30 |
分别对d区域与e区域降水粒子形状进行统计,结果表明d区域(对流泡上部)以球状和六边形板状粒子为主,分别占36%和24%,与朱士超和郭学良(2014)的研究结果相似。Kobayashi-Prupparcher模式中,冰晶的初始形状特征由基面最大尺度和棱面高度的比值决定(王昂生和Fukuta,1984)。在-12~-8 ℃区间基面最大尺度与棱面高度的比值介于2~10,棱面的表面相对扩散速率快于基面,水汽更易向棱面扩散发展,冰晶的初始形态表现为板状冰晶。因d区域过冷水含量较低,粒子主要通过凝华过程进行增长,因此粒子多为类球状,并非严格意义上的规则圆球形。少量霰粒子生成表明高层存在凇附增长过程,Herzegh and Hobbs(1980)指出当气流垂直上升速度超过0.6 m·s-1时对流泡内将发生凇附过程。由于过冷水较少,d区域内凇附过程不是主要增长方式。e区域(对流泡中部)球状粒子减少,而不规则状和柱状粒子增加,分别从17%增加到24%和从7%增加到11%。降水粒子在掉落至0 ℃层时表面发生融化形成准液膜,且0 ℃层附近存在较强的气流扰动,上升气流与下沉气流并存,少量单体相互碰并粘连后形成不规则状粒子,从而提升了不规则粒子的占比。柱状粒子的主要增长温度区间为-8~-5 ℃(王昂生和Fukuta,1984),e区域柱状粒子占比的增加与高层降水粒子掉落过程中的增长有关。
3 结论
利用PREN模型对降水粒子进行分类识别,经过训练的模型识别准确率可达98%。选取2次典型积层混合云降水过程,使用机载Ka波段云雷达和DMT粒子测量系统等设备进行穿云探测,利用雷达反射率识别积层混合云内的对流泡并分析对流泡内外降水粒子的形状和尺度等特征及增长演变机制,得到如下结论:
(1)针对降水粒子分类问题,构建PREN模型,通过多维度混和的模型放缩方法实现了降水粒子高准确率的自动分类。使用ACC、MiPre、MaPre、MaRa和F1-score等参数对PREN模型性能进行全面评估,各参数均为98%,说明PREN模型较传统深度学习网络具有更好的泛化能力和鲁棒性。
(2)对流泡内降水粒子形状种类齐全,以球状、针状、不规则状和柱状为主,有少量霰粒子和聚合体及板状粒子。对流泡外降水粒子多为球状和针状。对流泡内的动力和微物理参数有利于各类粒子增长,内部粒子平均弦长高于外部。
(3)不同强度的对流泡内云微物理参数不同。降水成熟阶段上升气流速度和液态水含量均高于降水消散阶段,有利于降水粒子的增长;降水成熟阶段对流泡内霰粒子和针状粒子的占比高于消散阶段;成熟阶段降水粒子平均弦长415 μm,消散阶段粒子平均弦长367 μm。
(4)降水发展阶段对流泡上部降水粒子种类齐全,以球状和六边形板状粒子为主,主要通过凝华过程进行增长。对流泡中部球状粒子减少,不规则和柱状粒子增加,融化过程促进了碰并增长。
由于本文在训练PREN模型时用到的10架次2 700张图像均为山东省不同降水云系的飞机观测,因此模型的地域泛化能力存在短板,仅能对我国华北地区冷云降水粒子进行识别分类,可能无法精准识别我国西北地区、青藏高原地区或南方地区降水粒子的形态。此外本文构建的SD-PPID图像数据集中样本量偏少,亟需进一步补充典型降水粒子图片数量。计划今后继续丰富图像数据集样本量,尝试将华北地区其他省份机载观测图像纳入进来,不断提高PREN对华北冷云降水粒子识别准确度。
参考文献
河北春季一次飞机人工增雪的综合分析
[J].
2013年4月19日,河北省人工影响天气办公室在河北中南部地区根据云系特点首次采用多层次水平催化和垂直验证的方式对层状云进行人工催化和探测。本文利用机载仪器所取得的飞机探测资料,结合实时天气卫星、雷达、探空和雨量观测资料,分析了河北春季层状云增雪作业的技术指标,探讨了航测微物理参量和卫星、雷达、探空等资料在作业中的应用。结果表明:云在发展期雷达回波由15 dBZ逐步上升到25~35 dBZ,卫星反演的云顶高度云顶温度、有效粒子半径、光学厚度等都有增加;云在中后期有效粒子半径、光学厚度、液水路径迅速下降,雷达回波同时减弱在高度3177~5723 m之间过冷云滴达100~700个/cm <sup>3</sup>,含水量在0.01g•m<sup>-3</sup>左右,最大0.081g•m<sup>–3</sup>,云粒子主要在此增长,形成降水粒子,该区间适宜催化作业后,影响区内云体发展,雷达回波增强,出现35 dBZ强回波,且强回波中心扩大;卫星反演的云顶高度光学厚度等比对比区有明显增加。
西北干旱地区一次降水性层状云的飞机观测分析
[J].利用机载PMS 粒子探测系统对2007 年8 月30 日甘肃省河西地区一次降水性天气过程进行空中观测,通过对云的微物理特征进行分析,对西北干旱地区夏季降水云的微物理结构有了一些认识。观测到此次云层中小云粒子平均浓度为4. 62 ×106 个/ m<sup>3</sup>;计算含水量均值为0. 0134 g/ m<sup>3</sup>;粒子平均直径均值为15 μm。发现云系上层云水含量、云粒子浓度都较下层大,水汽主要由较高层的系统输送。
冰晶增长规律的定量研究
[J].
深度学习模型在2021年汛期武汉市雷达回波临近预报中的应用评估
[J].近年来,人工智能技术在图像识别领域取得了突破性进展,为探寻人工智能模型在武汉地区雷达回波临近预报中的应用价值,本文利用湖北武汉市2015—2020年雷达回波和降水量观测资料,对PredRNN++、MIM、CrevNet和PhyDNet 4种深度学习模型进行雷达回波临近预报训练,并基于2021年汛期雷达回波资料进行雷达回波临近预报。在此基础上,通过降水强度和降水面积指数筛选降水过程,并以均方误差(Mean Square Error, MSE)、结构相似性指数(Structural Similarity Index Measurement, SSIM)、命中率(Probability of Detection, POD)、空报率(False Alarm Rate, FAR)和临界成功指数(Critical Success Index, CSI)为指标,检验评估上述4种深度学习模型和光流法对2021年汛期武汉地区雷达回波的临近预报性能。结果表明:(1)整体来看,MIM模型的MSE最小、POD最高,MIM和PredRNN++模型的SSIM并列最高;所有深度学习模型的FAR均低于光流法,且PhyDNet模型的FAR最低;除CrevNet模型外,其余3种深度学习模型的CSI均高于光流法,且MIM模型的CSI最高。(2)预报的前12 min,光流法的CSI最高,而在18~120 min MIM模型的CSI最高,显示了深度学习模型长预报时效的优势。(3)随着回波强度增加,深度学习模型和光流法的POD和CSI均迅速降低,而FAR光流法与各模型则表现出不同的变化规律。(4)随着区域性降水强度增加,深度学习模型的预报能力均先降低后明显增强,而光流法对降水强度变化的敏感性较弱,故在强降水背景下深度学习模型的CSI较光流法增幅最大;对于局地一般对流性降水过程,所有深度学习模型和光流法的预报能力均大幅降低。(5)暴雨个例分析结果表明,深度学习模型不仅具备一定回波强度变化的预报能力,而且对回波运动的预报能力也明显高于光流法,展示了深度学习模型良好的应用前景。
The IMPROVE-1 storm of 1-2 February 2001. part II: cloud structures and the growth of precipitation
[J].
Deep residual learning for image recognition
[C]//
The mesoscale and microscale structure and organization of clouds and precipitation in midlatitude cyclones. II: warm-frontal clouds
[J].
Techniques employed in the processing of particle size spectra and state parameter data obtained with the T-28 aircraft platform
[M].
Cloud conditions favoring secondary ice particle production in tropical maritime convection
[J].
Reducing the dimensionality of data with neural networks
[J].
Rainbands, precipitation cores and generating cells in a cyclonic storm
[J].
Some techniques and uses of 2D-C habit classification software for snow particles
[J].
Observations of freezing drizzle in extratropical cyclonic storms during IMPROVE-2
[J].
Cloudnet: continuous evaluation of cloud profiles in seven operational models using ground-based observations
[J].
ImageNet classification with deep convolutional neural networks
[C]//
The nature and detectability of clouds and precipitation as determined by 1.25-centimeter radar
[J].
Feature extraction and selection for pattern recognition of two-dimensional hydrometeor images
[J].
Vertical velocity and physical structure of generating cells and convection in the comma head region of continental winter cyclones
[J].
Very deep convolutional networks for large-scale image recognition
[J].
EfficientNet: rethinking model scaling for convolutional neural networks
[EB/OL].
Characteristics of vertical air motion in isolated convective clouds
[J].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}